2024 Seminar Archive
Spring, 2024
Robust Autonomous Vehicle Localization using GPS: from Tandem Drifting Cars to “GPS” on the Moon
Grace X. Gao
Assistant Professor
Department of Aeronautics and Astronautics
Stanford University
Stanford, CA
Autonomous vehicles often operate in complex environments with various sensing uncertainties. On Earth, GPS signals can be blocked or reflected by buildings; and camera measurements are susceptible to lighting conditions. While having a variety of sensors is beneficial, including more sensing information can introduce more sensing failures as well as more computational load. For space applications, such as localization on the Moon, it can be even more challenging.
In this talk, I will present our recent research efforts on robust vehicle localization under sensing uncertainties. We turn sensing noise and even absence of sensing into useful navigational signals. Inspired by cognitive attention in humans, we select a subset of “attention landmarks” from sensing measurements to reduce computation load and provide robust positioning. I will also show our localization techniques that enable various applications, from autonomous tandem drifting cars to a GPS-like system for the Moon.
Grace X. Gao is an assistant professor in the Department of Aeronautics and Astronautics at Stanford University. She leads the Navigation and Autonomous Vehicles Laboratory (NAV Lab). Prof. Gao has won a number of awards, including the National Science Foundation CAREER Award, the Institute of Navigation Early Achievement Award and the RTCA William E. Jackson Award. Prof. Gao and her students won Best Presentation of the Session/Best Paper Awards 29 times at Institute of Navigation conferences over the past 17 years. She also won various teaching and advising awards, including the Illinois College of Engineering Everitt Award for Teaching Excellence, the Engineering Council Award for Excellence in Advising, AIAA Illinois Chapter’s Teacher of the Year, and most recently Advisor of the Year Award and Teacher of the Year Award by AIAA Stanford Chapter in 2022 and 2023, respectively.
Wednesday, January 24, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Nguyen
Enabling Sustainable Propulsion and Clean Energy Transitions: Reacting Flow Modeling across Molecular to Continuum Scales
Rui Xu
Postdoctoral Scholar
Department of Chemistry
Stanford University
Stanford, CA
While the global demand for air travel continues to rise, the aerospace carbon footprint is increasingly concerning. In the near term, it is highly desirable for the rational design, efficient certification, and massive production of carbon-neutral fuels to mitigate greenhouse emissions. Furthermore, future aerospace vehicles will be integrated with highly efficient and high-speed propulsion devices using clean and renewable energy sources. The design of these sustainable and high-speed propulsion systems requires a fundamental understanding of reacting flow physics across multiple scales, featuring interactions between the molecular and the continuum flow scale. In this talk, I will present state-of-the-art approaches to multiscale reacting flow modeling of sustainable aerospace energy carriers. The modeling spans from molecular scale using GPU-enabled quantum chemistry computation to continuum scale gas dynamics and turbulence-resolved flow modeling. I will first emphasize the reacting flow modeling of bio-derived sustainable aviation fuel (SAF), which is considered a near-term alternative to conventional jet fuels. I will then discuss the study of methane and natural gas as potential transition fuels, along with hydrogen and battery technologies for the long-term future. I envision that the presented approach will help not only to enable sustainable aviation but also to advance a clean and sustainable transition in the future energy landscape.
 Rui (Ray) Xu is a Postdoctoral Scholar in the Department of Chemistry at Stanford University and the PULSE Institute in the SLAC National Accelerator Laboratory. His research centers around multiscale reacting flow modeling to enable sustainable aerospace propulsion and clean energy transitions. Dr. Xu obtained his Ph.D. in Mechanical Engineering from Stanford University, his M.S. in Mechanical Engineering from Northwestern University, and his B.S. in Mechanical Engineering from Shanghai Jiao Tong University. He is the recipient of the ACS Wiley Computers in Chemistry Outstanding Postdoc Award in 2024 and the ACTC AFOSR Scholar Award in 2022.
Rui (Ray) Xu is a Postdoctoral Scholar in the Department of Chemistry at Stanford University and the PULSE Institute in the SLAC National Accelerator Laboratory. His research centers around multiscale reacting flow modeling to enable sustainable aerospace propulsion and clean energy transitions. Dr. Xu obtained his Ph.D. in Mechanical Engineering from Stanford University, his M.S. in Mechanical Engineering from Northwestern University, and his B.S. in Mechanical Engineering from Shanghai Jiao Tong University. He is the recipient of the ACS Wiley Computers in Chemistry Outstanding Postdoc Award in 2024 and the ACTC AFOSR Scholar Award in 2022.
Wednesday, January 31, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Microfluidics with Macro-Impact: Advancing Sustainability
through Nanoparticle - Enhanced Foams for Optimized CO2 Sequestration
Negar Nazari
Postdoctoral Fellow
School of Engineering and Applied Sciences
Harvard University
Cambridge, MA
The contemporary global challenge centers on ensuring water and energy access for a growing population while minimizing environmental impacts and promoting sustainability. Porous media play a crucial role in this, facilitating processes like carbon sequestration, hydrogen storage, and geothermal energy extraction within geological formations. The Paris Climate Accord emphasizes reducing greenhouse gas emissions, with carbon sequestration in geological formations being a potential solution. However, challenges like ensuring safe storage and preventing leaks remain.
Utilizing a foaming solution alongside CO2 injection emerges as a promising method to reduce the mobility of CO2, enhancing the blockage of CO2 in more permeable areas and thus bolstering storage safety. A significant hurdle in this technique is the thermodynamic instability of the bubble interface in the high salinity brines found in host formations. The introduction of nanoparticles enhances the interface's stability, counteracting the capillary forces that destabilize the foam's lamellae. The dynamics of gas-liquid interfaces differ between aqueous surfactants and nanoparticles. Nanoparticles impact the drag on elongated bubbles at low capillary numbers by establishing monolayer formations at the fluid interface, which in turn increases the interfacial dilatational viscoelasticity. This enhancement in viscoelasticity strengthens the interface's dynamic resistance to changes in surface area, whether through stretching or compressing, thereby improving the stability of the interface.
 Negar Nazari is a Postdoctoral fellow at the school of engineering and applied sciences at Harvard University. Her research focuses on understanding complex fluid flow and transport in porous media with particular emphasis on topics relevant to energy and sustainability including but not limited to carbon and hydrogen storage. Prior to her postdoc, she completed her PhD at the energy science and engineering department at Stanford University. Her PhD research focused on microscale analysis of fluid-fluid interactions and complex multiphase flow in fractured systems and channels. Her research interests lie in energy and sustainability, microfluidics, and data-driven and programming techniques to upscale flow studies. Negar received the Trailblazing Researcher Award from the California Institute of Technology for exceptional contributions and frontier research in Energy and Sustainability.
Negar Nazari is a Postdoctoral fellow at the school of engineering and applied sciences at Harvard University. Her research focuses on understanding complex fluid flow and transport in porous media with particular emphasis on topics relevant to energy and sustainability including but not limited to carbon and hydrogen storage. Prior to her postdoc, she completed her PhD at the energy science and engineering department at Stanford University. Her PhD research focused on microscale analysis of fluid-fluid interactions and complex multiphase flow in fractured systems and channels. Her research interests lie in energy and sustainability, microfluidics, and data-driven and programming techniques to upscale flow studies. Negar received the Trailblazing Researcher Award from the California Institute of Technology for exceptional contributions and frontier research in Energy and Sustainability.
Wednesday, February 7, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at
https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Computational Paradigms Towards Sustainable Aeronautics
Zhenyu Gao
Postdoctoral Fellow
Department of Aerospace Engineering and Engineering Mechanics
The University of Texas at Austin
Austin, TX
As technology and the environment rapidly evolve, the aerospace industry is actively seeking solutions to three significant opportunities and challenges. First, the data-intensive transformation will reframe the aerospace industry with big data technologies, analytical methods, and high-performance computation. Second, future aerospace systems must be environmentally, socially, and economically sustainable. Third, aerospace systems of diverse types and capabilities will grow robustly and operate at larger scales. In this talk, I will share a series of recent studies which leverage data-driven and computational methods for the design and analysis of sustainable aeronautical systems. This includes (1) a machine learning approach for efficient and accurate aviation environmental impact modeling, (2) a data-driven optimization approach for holistic and equitable advanced air mobility noise management, and (3) a modeling and simulation approach for sustainable and safe 3D urban airspace design. This research highlights the significance of data-driven approaches for the sustainable development of novel aerospace systems.
 Zhenyu Gao is a Postdoctoral Fellow in the Department of Aerospace Engineering and Engineering Mechanics at The University of Texas at Austin. His areas of research encompass sustainable aviation, data-driven aerospace engineering, and intelligent transportation systems. He earned his Ph.D. in Aerospace Engineering and an M.S. in Operations Research from Georgia Institute of Technology, and a B.S. in Aerospace Engineering from the University of Illinois at Urbana–Champaign. His doctoral dissertation was awarded the 2023 Georgia Tech Sigma Xi Best Ph.D. Thesis Award. He has also served as a visiting researcher at the National University of Singapore and the Institute of Science and Technology Austria (ISTA). During his time at Georgia Tech and UT Austin, he has contributed to over ten research projects funded by entities such as the FAA, NASA, and industry corporations like The Boeing Company.
Zhenyu Gao is a Postdoctoral Fellow in the Department of Aerospace Engineering and Engineering Mechanics at The University of Texas at Austin. His areas of research encompass sustainable aviation, data-driven aerospace engineering, and intelligent transportation systems. He earned his Ph.D. in Aerospace Engineering and an M.S. in Operations Research from Georgia Institute of Technology, and a B.S. in Aerospace Engineering from the University of Illinois at Urbana–Champaign. His doctoral dissertation was awarded the 2023 Georgia Tech Sigma Xi Best Ph.D. Thesis Award. He has also served as a visiting researcher at the National University of Singapore and the Institute of Science and Technology Austria (ISTA). During his time at Georgia Tech and UT Austin, he has contributed to over ten research projects funded by entities such as the FAA, NASA, and industry corporations like The Boeing Company.
Wednesday, February 14, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Blending Soft and Rigid for Physical Intelligence in Robotics
Zach Patterson
Postdoctoral Associate
MIT Computer Science & Artificial Intelligence Lab
Massacussetts Institute of Technology
Cambridge, MA
Most large animals have a blend of soft and rigid materials in their load-bearing structures. This design principle is largely overlooked by traditional robotics, which favors rigid materials, and by soft robotics, which predominantly uses soft components. Inspired by the natural integration of these materials in the animal kingdom, my research aims to develop robotic systems that combine soft and rigid elements harmoniously, leading to inherent "physical intelligence.” I will begin with an exploration of manipulators that embody this innovative soft-strong paradigm, followed by a discussion on the critical role of advanced control algorithms in harnessing physical intelligence effectively. Next, I will showcase the application of this soft-rigid hybrid approach in creating biomimetic robots, drawing inspiration from marine creatures like sea turtles and echinoderms. These biomimetic robots serve as versatile experimental platforms, enabling us to explore and elucidate questions in biomechanics and paleobiology that are otherwise challenging to address. I will finally discuss how these diverse categories of robots could revolutionize the interactions of intelligent machines with the environment.
Zach Patterson is a Postdoctoral Associate at the MIT Computer Science & Artificial Intelligence Lab. His research sits at the intersection of robot design, control, and biomimetics with a focus on utilizing soft robotic technologies. Zach received his B.S. in Mechanical Engineering from the University of Pittsburgh in 2017 and his Ph.D. in Mechanical Engineering from Carnegie Mellon University in 2022.
February 26, 2024 (Monday)
1:30 PM
Laufer Conference Room, Olin Hall of Engineering, Room 406 (OHE 406)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Intelligent Wearable Systems for Synergistic Human-Robot Interactions
Keya Ghonasgi
Postdoctoral Fellow
Exoskeleton and Prosthetic Intelligent Controls (EPIC) Lab
Georgia Institute of Technology
Atlanta, GA
Wearable robots hold immense, untapped potential to enhance human performance through physical interactions combining human and robot abilities. For instance, assistive robots can follow user intent while overcoming limitations like reduced strength due to neurological injuries. Surgical robots can enhance expert surgeons’ skill with precision and accuracy. In the future, wearable robots could become as ubiquitous as smart watches and phones. However, current state-of-the-art solutions face challenges – providing limited improvements in performance, being expensive and impractical for the real-world, or causing discomfort, leading to abandonment. This talk showcases three avenues to unlock the promised synergistic potential of humans and robots.
First, I explore the role of understanding human interaction behaviors in the development of responsive robots. For example, combining data-driven and model-based approaches can help us characterize behaviors and identify generalizable movement patterns. Next, I discuss how robots can be tailored to suit human biomechanics and abilities. For instance, can diverse users easily interact with the device? If not, can humans be taught to interact with non-intuitive robots? Finally, I motivate the need for simultaneous learning in the individual and the robot. Such co-evolving systems enable personalized interactions, especially beneficial for individualized rehabilitation or skill training applications. These research areas are interlinked, requiring an interdisciplinary approach at the intersection of human neuroscience and biomechanics, artificial intelligence, and robot design and control. This research empowers synergistic robot interactions and paves the way for the seamless integration of wearable robots into human life.
 Keya Ghonasgi is a postdoctoral fellow at the Georgia Institute of Technology where she works with lower limb assistive devices. She received her Ph.D. in Mechanical Engineering from the University of Texas at Austin (UT) in 2023 and her M.S. in Mechanical Engineering from Columbia University in 2018. Keya’s research on robotic exoskeletons has led to honors including being selected as a Rising Star in Mechanical Engineering (2022) and a CalTech Young Investigator Lecturer (2023). Keya’s work has been funded through various sources including a UT graduate student fellowship award, an NSF M3X grant, and industry collaborations with Meta Reality Labs and Google Brain. Keya is passionate about developing the next generation of human-interactive technology in the form of wearable robots that harness synergistic human and robot capabilities.
Keya Ghonasgi is a postdoctoral fellow at the Georgia Institute of Technology where she works with lower limb assistive devices. She received her Ph.D. in Mechanical Engineering from the University of Texas at Austin (UT) in 2023 and her M.S. in Mechanical Engineering from Columbia University in 2018. Keya’s research on robotic exoskeletons has led to honors including being selected as a Rising Star in Mechanical Engineering (2022) and a CalTech Young Investigator Lecturer (2023). Keya’s work has been funded through various sources including a UT graduate student fellowship award, an NSF M3X grant, and industry collaborations with Meta Reality Labs and Google Brain. Keya is passionate about developing the next generation of human-interactive technology in the form of wearable robots that harness synergistic human and robot capabilities.
Wednesday, February 28, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
To Err is Robotic: Enabling Robust Autonomy with Risk-Sensitivity
Preston Culbertson
Postdoctoral Scholar
AMBER Lab
California Institute of Technology
Pasadena, CA
Despite significant recent advances in robot learning and perception, achieving robust robot behavior for real-world, dynamic tasks like dexterous manipulation remains elusive. This challenge stems from the uncertainty inherent in robots' geometric models, perception systems, and controllers, particularly during dynamic interactions with the environment. This talk explores how risk-sensitivity can provide a principled, practical approach to addressing these robustness issues directly. First, I will discuss our work showing Neural Radiance Fields (NeRFs) — typically trained for novel view synthesis — can be used for both collision avoidance and localization, repurposing them as a versatile, probabilistic occupancy model for robotics. Next, we will turn to the problem of real-time, risk-sensitive planning more broadly. Specifically, I will present work combining stochastic control barrier functions (CBFs), which provide rigorous probabilistic safety/performance guarantees, with deep generative dynamics models to yield a lightweight, data-driven approach to risk-sensitive control. We have demonstrated that our method (running onboard a quadrotor at 100Hz) enables aggressive, yet safe flight with a completely unmodeled and uninstrumented slung load. The talk will conclude with a discussion of some lessons learned and future directions in risk-sensitive robotics.
Preston Culbertson is a postdoctoral scholar in the AMBER Lab at Caltech. His research interests lie at the intersection of robotics, machine learning, optimization, and computer vision. Specifically, his research explores how to enable robust robot behavior for dynamic, contact-rich tasks like manipulation, locomotion, and navigation, emphasizing new tools for understanding risk and uncertainty for autonomous systems. Preston earned his PhD from Stanford University, mentored by Prof. Mac Schwager, where his work on collaborative manipulation and robot assembly was awarded the NASA Space Technology Research Fellowship and the 'Best Manipulation Paper' award at ICRA 2018.
Monday, March 4, 2024
1:30 PM
Laufer Conference Room, Olin Hall of Engineering, Room 406 (OHE 406)
The Zoom webinar is at
https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Physics-Aware Data-Driven Modeling and Uncertainty Quantification for Large-Scale Environmental Problems
Hannah Lu
Postdoctoral Associate
Department of Aeronautics and Astronautics, Department of Civil Environmental Engineering, Earth Resources Laboratory and Laboratory for Information and Decision Systems
MIT
Cambridge, MA
Data-driven modeling of complex systems is a rapidly evolving field facilitated by the concurrent rise of data science. To alleviate the prohibitively expensive computational costs of repeated full-model simulations in uncertainty quantification, data-driven modeling is often used to describe the behaviors of the complex system by predicting the quantities of interest directly. In this talk, I will present my contributions to this field with an emphasis on (1) improving model performance by using physics-aware machine learning techniques, (2) quantifying uncertainties in the system’s response, and (3) inferring the key parameters of the physics-based models from measured data. Examples of applications will be focused on large-scale geological carbon sequestration—an important strategy for reducing greenhouse gas emissions to the atmosphere and mitigating climate change. The objective is to develop a convenient computing toolbox to provide more accurate scientific information at cheaper computational costs for better environmental management and decision-making.
Hannah Lu is a postdoc associate at MIT, affiliated with the Department of Aeronautics and Astronautics, Department of Civil Environmental Engineering, Earth Resources Laboratory and Laboratory for Information and Decision Systems. She obtained her Ph.D. from Energy Science and Engineering at Stanford Doerr School of Sustainability. Her research interests lie in the field of scientific computing, reduced order modeling, uncertainty quantification and machine learning in applications of environmental fluid mechanics. She received EDGE Doctoral Fellowship, Frank G. Miller Fellowship Award and Henry J. Ramey, Jr. Fellowship Award from Stanford University; Student Travel Award from SIAM Conference on UQ; NSF Fellowship from MMLDT-CSET Conference; Travel Grant from NSF-funded HydroML Symposium; and a first-place USNCCM17 Best Presentation Award in postdoc category.
Wednesday, March 6, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at
https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Dexterous Decision-Making for Real-World Robotic Manipulation
Rachel Holladay
Doctoral Candidate
Electrical Engineering and Computer Science Department
Massachusetts Institute of Technology
Cambridge, MA
For a robot to prepare a meal or clean a room, it must make a large array of decisions, such as what objects to clean first, where to grasp each ingredient and tool, how to open a heavy, overstuffed cabinet, and so on. To enable robots to tackle these tasks, I decompose the problem into two interdependent layers: generating a series of subgoals (i.e., a strategy) and solving for the robot behavior that achieves each of these subgoals. Critically, to accomplish a rich set of manipulation tasks, these subgoal solvers must account for force, motion, deformation, contact, uncertainty and partial observability.
My research contributes models and algorithms that enable robots to reason over both the geometry and physics of the world in order to solve long-horizon manipulation tasks. In this talk, I will first discuss how this approach has enabled robots to perform tasks that require reasoning over and exerting force, like opening a childproof medicine bottle with a single arm. Next, I will present an abstraction for the complex physics of frictional pushing and demonstrate its application within the context of in-hand manipulation. Finally, I will illustrate how robots can make robust choices in the face of uncertainty. For example, this empowers robots to reliably chop up fruit of unknown ripeness!

Rachel Holladay is a Ph.D. student in the Electrical Engineering and Computer Science Department at the Massachusetts Institute of Technology. Her research focuses on developing algorithms and models that enable robots to robustly perform long-horizon, contact-rich manipulation tasks in everyday environments. She received her B.S. in Computer Science and Robotics from Carnegie Mellon University.
Monday, March 18, 2024
1:30 PM
Laufer Conference Room, Olin Hall of Engineering, Room 406 (OHE 406)
The Zoom webinar is at
https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Walking Droplets and Galloping Bubbles
Pedro Sáenz
Assistant Professor
Physical Mathematics Laboratory
Department of Mathematics
University of North Carolina at Chapel Hill
Chapel Hill, NC
In the first part of this talk, we present a classical wave-particle analog of Anderson localization with walking droplets, which self-propel across the surface of a vibrating fluid bath through a resonant interaction with its own guiding wave fild. These walking droplets, or 'walkers', push the boundaries of classical mechanics to include behaviors previously thought to be exclusive to the quantum realm. By investigating the erratic motion of walkers over submerged random topographies, we demonstrate the emergence of localized statistics analogous to those of quantum particles. Consideration of an ensemble of walker trajectories reveals a suppression of diffusion when the guiding wave field extends over the disordered topography. The emergent statistics are rationalized mechanistically by virtue of the wave-mediated resonant coupling between the droplet and topography, which generates an attractive wave potential about the localization region. This hydrodynamic quantum analog demonstrates how a classical particle may localize like a wave, and so suggests new directions for future research.
The second part of this talk is dedicated to introducing a new symmetry-breaking instability inspired by walking droplets that causes bubbles to self-propel. We illustrate how a vertically vibrated bubble may spontaneously start to "gallop" along solid boundaries due to a parametric instability in its shape oscillations. A systematic exploration of the key system parameters reveals a myriad of domain exploration modes, including rectilinear, circular, and run-and-tumble motions. We use direct numerical simulations to extend the galloping instability to hemispherical bubbles. The bubble's spectrum and a perturbative stability analysis shows that the galloping instability results from the coupling between symmetric and asymmetric modes about the vibration axis. By computing the inertial reaction of an inviscid external liquid to the bubble deformation, we describe the bubble's propulsion as a manifestation of Saffman's mechanism of swimming in inviscid flow. We present a series of proof-of-concept experiments showcasing the potential of galloping bubbles for practical applications.

 Pedro Sáenz is an Assistant Professor and the director of the Physical Mathematics Laboratory (www.pml.unc.edu) in the Department of Mathematics at UNC. From 2015 to 2019, he was an Instructor in Applied Mathematics at MIT. Pedro received his Ph.D. from the University of Edinburgh in 2014, and was a post-doctoral fellow at Imperial College London in 2015. Pedro was awarded an Alfred P. Sloan Research Fellowship in 2023, and an NSF CAREER award in 2021. Pedro has also received multiple scientific visualization awards, including the American Physical Society Gallery Fluid of Motion award in 2017 and 2022. His research blends experiments, numerical simulations and theory to address fundamental problems that find motivation in physics and engineering.
Pedro Sáenz is an Assistant Professor and the director of the Physical Mathematics Laboratory (www.pml.unc.edu) in the Department of Mathematics at UNC. From 2015 to 2019, he was an Instructor in Applied Mathematics at MIT. Pedro received his Ph.D. from the University of Edinburgh in 2014, and was a post-doctoral fellow at Imperial College London in 2015. Pedro was awarded an Alfred P. Sloan Research Fellowship in 2023, and an NSF CAREER award in 2021. Pedro has also received multiple scientific visualization awards, including the American Physical Society Gallery Fluid of Motion award in 2017 and 2022. His research blends experiments, numerical simulations and theory to address fundamental problems that find motivation in physics and engineering.
Wednesday, March 20, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at
https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Kanso
Ultrasound-Responsive Intelligent Material Systems
Shima Shahab
Associate Professor
and
Mary V. Jones Faculty Fellow
Department of Mechanical Engineering
Virginia Tech
Arlington, VA
Intelligent material systems, often known as smart materials, may adapt their behavior in response to changes in external stimuli. The use of smart materials in numerous sensitive applications has increased the demand for a remote, wireless, efficient, and physiologically safe stimulus. These needs will be addressed in this presentation by using Focused Ultrasound (FUS) as an external trigger. To achieve the desired response of an ultrasound-responsive smart structure, FUS has the unique property of maintaining both spatial and temporal control and propagating over large distances with low losses. Shape Memory Polymers (SMPs) and piezoelectric (PZT) materials will be discussed as ultrasound-responsive smart materials. First, we will look into the acoustic-thermoelastic dynamics of ultrasound-stimulated SMPs in order to develop next-generation delivery, sensing, and morphing devices. When activated by FUS, SMPs can be manipulated into any temporary shape and then recover to their stress-free permanent shape. FUS is a promising stimulus with the unique and superior capacity to cause localized heating, activate various intermediate shapes, and enable noninvasive shape recovery in polymers. Second, we'll go through the fundamentals of PZT-based Ultrasonic Power Transfer (UPT) systems. UPT along with acoustic holograms is a new technique that relies on piezoelectric receivers to receive FU in selective patterns. UPT is used to wirelessly charge modest to high-power electronics in biomedical implants and enclosed electronic devices working in unmanned aerial and undersea vehicles. Finally, holographic lenses, also referred to as acoustic holograms, will be discussed. These lenses are utilized to generate complicated FUS fields. They save the desired wavefront's phase profile, which is utilized to reconstruct the acoustic pressure field when illuminated by a single acoustic source. Because of its robustness, simplicity, and low cost, the use of holographic lenses for sound modification in medical applications has attracted interest in recent years. Ultrasound-guided thermal therapy is one such application that use the absorbed acoustic field to generate a therapeutic effect within the human body.
 Shima Shahab is Mary V. Jones Faculty Fellow and an Associate Professor in the Department of Mechanical Engineering at Virginia Tech. She completed her Ph.D. and M.S. in Mechanical Engineering at Georgia Institute of Technology. Dr. Shahab is the Director of Multiphysics Intelligent and Dynamical Systems (MInDS) laboratory and an Associate Editor of Journal of Intelligent Material Systems and Structures (JIMSS). Her theoretical and experimental research program focuses on the intersection of smart materials and dynamical systems for various interdisciplinary applications such as contactless ultrasound power transfer, ultrasound responsive polymer-based systems, ultrasound atomization, and acoustic holograms. Dr. Shahab has served as principal investigator on research grants from the National Science Foundation, Alpha Foundation, Oakridge National Laboratory, and Ford Motor Company. In addition to a recent NSF CAREER award, Dr. Shahab is the recipient of ASME Gary Anderson Early Achievement Award. The award recognizes a young researcher on the rise who has already made significant contributions to the field of Adaptive Structures and Material Systems.
Shima Shahab is Mary V. Jones Faculty Fellow and an Associate Professor in the Department of Mechanical Engineering at Virginia Tech. She completed her Ph.D. and M.S. in Mechanical Engineering at Georgia Institute of Technology. Dr. Shahab is the Director of Multiphysics Intelligent and Dynamical Systems (MInDS) laboratory and an Associate Editor of Journal of Intelligent Material Systems and Structures (JIMSS). Her theoretical and experimental research program focuses on the intersection of smart materials and dynamical systems for various interdisciplinary applications such as contactless ultrasound power transfer, ultrasound responsive polymer-based systems, ultrasound atomization, and acoustic holograms. Dr. Shahab has served as principal investigator on research grants from the National Science Foundation, Alpha Foundation, Oakridge National Laboratory, and Ford Motor Company. In addition to a recent NSF CAREER award, Dr. Shahab is the recipient of ASME Gary Anderson Early Achievement Award. The award recognizes a young researcher on the rise who has already made significant contributions to the field of Adaptive Structures and Material Systems.
More at https://me.vt.edu/people/faculty/shahab-shima.html .
Wednesday, March 27, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Maghsoodi
Role of Arterial Stiffness and Pulsatile Hemodynamics in Target Organ Damage: Implications for Human Health
Julio A. Chirinos
Professor of Medicine
Cardiovascular Division
Perelman School of Medicine
University of Pennsylvania
Philadelphia, PA
The normal aorta exerts a powerful cushioning function, which limits arterial pulsatility and protects the microvasculature from excessive fluctuations in pressure and blood flow. Large-artery stiffening, which occurs with aging and various pathologic states, impairs this cushioning function, and has important consequences on target organs, including the brain, the heart, the kidneys and the placenta. Arterial stiffness also appears to be implicated in the pathogenesis of cardiometabolic disease. Large-artery stiffness represents a high-priority therapeutic target to ameliorate the global burden of cardiovascular disease in the next several decades. We will discuss key physiologic and biophysical principles related to arterial stiffness and the impact of aortic stiffening on target organs and associated disease states.
 Julio A. Chirinos, MD, PhD is a Professor of Medicine in the Cardiovascular Division, Co-Director of the Clinical Research T32 Training Program in Cardiovascular Biology and Medicine, and Adjunct Faculty at the Center for Magnetic Resonance and Optical Imaging, at the University of Pennsylvania Perelman School of Medicine. He is a specialist in cardiac imaging (echocardiography and cardiac magnetic resonance imaging). He is also adjunct Faculty at the University of Ghent in Belgium, where he maintains an active collaboration with the Asklepios Investigators. His PhD was focused on the non-invasive assessment of arterial hemodynamics. He is the President of the North American Artery Society.
Julio A. Chirinos, MD, PhD is a Professor of Medicine in the Cardiovascular Division, Co-Director of the Clinical Research T32 Training Program in Cardiovascular Biology and Medicine, and Adjunct Faculty at the Center for Magnetic Resonance and Optical Imaging, at the University of Pennsylvania Perelman School of Medicine. He is a specialist in cardiac imaging (echocardiography and cardiac magnetic resonance imaging). He is also adjunct Faculty at the University of Ghent in Belgium, where he maintains an active collaboration with the Asklepios Investigators. His PhD was focused on the non-invasive assessment of arterial hemodynamics. He is the President of the North American Artery Society.
He directs an NIH-funded research program focused on the role of arterial stiffness and pulsatile hemodynamics in cardiovascular disease, mechanisms of human heart failure with preserved ejection fraction (HFpEF) and the use of proteomics to discern mechanisms of human heart failure. He currently leads clinical studies designed to therapeutically target the arterial tree in order to reduce maladaptive cardiac remodeling, diastolic dysfunction, and to treat patients with HFpEF, an epidemic condition for which limited effective proven pharmacologic therapies are currently available. He also leads various cohort studies with deep cardiovascular phenotyping aimed at characterizing phenotypic profiles in humans. He co-leads a Global Heart Failure biomarker consortium, an industry-academic collaboration investigating proteomics and genomics in human heart failure. He is the University of Pennsylvania Principal Investigator and a Steering Committee member of Heart Share, a multicenter research consortium funded by the NHLBI aimed at discerning mechanisms of disease in human Heart Failure with Preserved Ejection Fraction.
Dr. Chirinos has published >250 papers in high-impact journals, including the New England Journal of Medicine, New England Journal of Medicine Evidence, The Lancet, The Lancet Respiratory Medicine, Journal of the American Medical Association (JAMA), Circulation, Hypertension, and Journal of the American College of Cardiology (JACC). He has received awards or honorary fellowships from the American Heart Association, the Inter-American Society of Cardiology, the American Society of Hypertension and the European Society of Cardiology. He is a member of the American Society of Clinical Investigation and an honorary member of the Korean Society of Cardiology. He has also received multiple research grants from the National Heart, Lung and Blood Institute (NHLBI), the National Institute on Aging (NIA), the National Institutes for Advancing Translational Sciences (NCATS), the American College of Radiology (ACR), and the American Heart Association (AHA), among others. He was one of 20 global members of the Lancet Commission for Hypertension, in charge of developing strategies and recommendations to reduce the global burden of hypertension. He has participated in various clinical expert committees for the American Heart Association, American Society of Echocardiography, European Society of Cardiology, American Society of Hypertension and European Association of Cardiovascular Imaging. During the COVID-19 pandemic, Dr. Chirinos led 2 international multicenter trials testing therapeutic strategies related to the intersection of COVID-19 and cardiovascular disease. He is also the co-PI of ongoing cohort studies to study the long-term cardiovascular consequences of COVID-19, co-chair of the Global Heart Failure Biomarker Consortium, and a Steering Committee Member of HeartShare. Both of these multicenter consortia are focused on the study of heart failure with preserved ejection fraction (HFpEF).
He is currently the President of the North American Artery society, which promotes the study of arterial function as a determinant of cardiovascular disease. He was also an Associate Editor of the American Heart Association Journal Circulation: Heart Failure, The Journal of Clinical Hypertension, Editor of the Cochrane Group (Cochrane Collaboration), Senior Consulting Editor of the Journal of the American College of Cardiology: Cardiovascular Imaging and a member of the editorial board of the Journal of the American Heart Association, Pulse and the Journal of Geriatric Cardiology. He is the editor of a textbook on Arterial Stiffness and Pulsatile Hemodynamics (Arterial Stiffness and Pulsatile Hemodynamics in Health and Disease; Elsevier, 2022).
Dr. Chirinos also directs a core analysis laboratory for assessments of cardiac and arterial structure and function with non-invasive imaging, which has served as the core lab for various multicenter studies, including population studies, American College of Radiology Network studies and industry-funded studies. He has been an invited speaker in >160 scientific sessions.
Wednesday, April 3, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Pahlevan
Do We Really Need All That Data? Learning and Control for Contact-Rich Manipulation
Michael Posa
Assistant Professor
Department of Mechanical Engineering and Applied Mechanics
University of Pennsylvania
Philadelphia, PA
For all the promise of big-data machine learning, what will happen when robots deploy to our homes and workplaces and inevitably encounter new objects, new tasks, and new environments? If a solution to every problem cannot be pre-trained, then robots will need to adapt to this novelty. Can a robot, instead, spend a few seconds to a few minutes gathering information and then accomplish a complex task? Why does it seem that so much data is required, anyway? I will first argue that the hybrid or contact-driven aspects of manipulation clashes with the inductive biases inherent in standard learning methods, driving this current need for large data. I will then show how contact-inspired implicit learning, embedding convex optimization, can reshape the loss landscape and enable more accurate training, better generalization, and ultimately data efficiency. Finally, I will present our latest results on how these learned models can be deployed via real-time multi-contact MPC for dexterous robotic manipulation, where the robot must autonomously make and break contact and initiate stick-slip transitions.
 Michael Posa is an Assistant Professor in Mechanical Engineering and Applied Mechanics at the University of Pennsylvania. He leads the Dynamic Autonomy and Intelligent Robotics (DAIR) lab, a group within the Penn GRASP laboratory. His group focuses on developing computationally tractable algorithms to enable robots to operate both dynamically and safely as they interact with their environments. Michael received his Ph.D. in Electrical Engineering and Computer Science from MIT in 2017 and received his B.S. in Mechanical Engineering from Stanford University in 2007. Before his doctoral studies, he worked as an engineer at Vecna Robotics. He received the NSF CAREER Award in 2023, the RSS Early Career Spotlight in 2023, a Google Faculty Research Award, and a Young Faculty Researcher Award from the Toyota Research Institute. His work has also received awards recognition at TRO, ICRA, Humanoids, and HSCC.
Michael Posa is an Assistant Professor in Mechanical Engineering and Applied Mechanics at the University of Pennsylvania. He leads the Dynamic Autonomy and Intelligent Robotics (DAIR) lab, a group within the Penn GRASP laboratory. His group focuses on developing computationally tractable algorithms to enable robots to operate both dynamically and safely as they interact with their environments. Michael received his Ph.D. in Electrical Engineering and Computer Science from MIT in 2017 and received his B.S. in Mechanical Engineering from Stanford University in 2007. Before his doctoral studies, he worked as an engineer at Vecna Robotics. He received the NSF CAREER Award in 2023, the RSS Early Career Spotlight in 2023, a Google Faculty Research Award, and a Young Faculty Researcher Award from the Toyota Research Institute. His work has also received awards recognition at TRO, ICRA, Humanoids, and HSCC.
Wednesday, April 10, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Nguyen
Colloidal Protein Analogs
Jasna Brujic
Professor
Center for Soft Matter Research at New York University
Physics Department
New York University
New York, NY
Our group is inspired by Nature’s strategy of folding biopolymers into specific protein and RNA structures to build a toy model of polymeric chains of droplets, i.e. “colloidomers”, that are designed via DNA interactions to fold into well-defined architectures. Indeed, simple alternating chains (up to 14 droplets long) with only two droplet flavors (ABABAB…) are sufficient to uniquely encode a dozen “foldamers”, constituting 1% of all possible rigid structures in 2D. Subsequently, these 2D foldamers can self-assemble into larger nets that, upon density-matching, are able to further fold into unique 3D geometries, for example viral capsids. These hierarchical protocols circumvent the vast phase space of the nominal folding landscape, in which a random cluster of 12 particles has tens of thousands or rigid folds to choose from. Once the colloidal protein analog is formed, it can then be further programmed by the polymerase-exonuclease-nickase (PEN) toolbox of enzymes that interact with droplet-droplet DNA bonds, to produce highly non-linear dynamical systems. These "mayonnaise robots” promise to offer a bright and functional future on the colloidal length scale.
Jasna Brujic is a Professor of Physics at New York University. She is one of the core faculty in the Center for Soft Matter Research. Brujic is an experimental physicist, who received her Ph.D. for work on the statistical mechanics of granular matter at the Cavendish Laboratory of the University of Cambridge, UK. She then conducted post-doctoral research at Columbia University in the area of single molecule proteins. Since 2007, Brujic has led a research group at the interface between soft matter physics and biophysics. The group uses biomimetic emulsion systems to study jammed matter, cellular organization in tissues in 3D, protein-protein adhesion, and programmable self-assembly of materials with custom designs.
Wednesday, April 17, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at
https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Kanso
The Effect of Reef Geometry On Breaking Wave Shape. Computational and Field Data Comparative Study
Adam Fincham
Chief Scientist and Engineer
Kelly Slater Wave Company (KSWC)
Lemoore, CA
and
Adjunct Research Associate Professor
Department of Aerospace & Mechanical Engineering
University of Southern California
Los Angeles, CA
With growing demand for inland surfing and interest in artificial surf reefs, CFD methods supplemented with field data constitute an effective tool that allows for analysis, optimization, and verification of the design performance of surfing waves. Bringing surfing to non-coastal areas provides big opportunities for a new market. This led to the formation of a new sub-genre of hydrodynamics engineering, where one is looking at transformation of shallow-water waves through a slightly different lens. In classical coastal engineering, wave characteristics can affect various design conditions of certain structures – however, in the following case, one is looking specifically into analysis, optimization, and verification of design performance of the surf-zone wave itself, i.e. its surfability aspect. This presentation provides a high-level overview of the scientific process behind the creation of the Kelly Slater Wave Company basin in Lemoore, CA. Some details of the new and much larger wave basin opening in Abu Dhabi, where excess energy from the main wave is reformed and broken again providing a secondary surfing experience will also be discussed.
 Adam Fincham is a Scientist, Engineer and an Entrepreneur. Dr. Fincham is currently the Chief Scientist and Engineer for the World Surf League’s (WSL) Kelly Slater Wave Company (KSWC). He is a Research Associate Professor of Aerospace and Mechanical Engineering at USC. He has successfully founded two technology companies and is the primary named inventor on dozens of US and International Patents.
Adam Fincham is a Scientist, Engineer and an Entrepreneur. Dr. Fincham is currently the Chief Scientist and Engineer for the World Surf League’s (WSL) Kelly Slater Wave Company (KSWC). He is a Research Associate Professor of Aerospace and Mechanical Engineering at USC. He has successfully founded two technology companies and is the primary named inventor on dozens of US and International Patents.
Fincham’s research interests include; Geophysical Fluid dynamics, turbulence and vortex structures in stratified and/or rotating flows, advanced algorithms for Digital Particle Imaging Velocimetry, particle dynamics in turbulent flows with application to oceanic plankton ecosystems, sonic boom interactions with the ocean surface, turbulent combustions at high Reynolds numbers, surfing wave dynamics, wave erosion and Computational Fluid Mechanics approaches to resolving breaking waves.
Fincham is from the island of Jamaica, he obtained his PhD in 1994 at the University of Southern California and was Chargé de Recherche at the Laboratoire des Ecoulements Geophysiques et Industriels, CNRS-INPG, Universite Joseph-Fourier, Grenoble, France. From 1995-2004. He has close ties to the University of the West Indies in Kingston Jamaica and interacts with scientists there.
Wednesday, April 24, 2024
3:30 PM
Zumberge Hall of Science, Room 252 (ZHS 252)
The Zoom webinar is at https://usc.zoom.us/j/95892885119?pwd=QXZOZUhrcTJRYk5qZzZwVThrTytVZz09.
host: Ronney
Fall, 2024
— Laufer Lecture —
The Finite Element Method and Isogeometric Analysis: Past, Present, Future
Thomas J.R. Hughes
John O. Hallquist Distinguished Chair in Computational Mechanics
Peter O'Donnell, Jr. Chair in Computational and Applied Mathematics
Lead Computational Mechanics Group
Professor Aerospace Engineering & Engineering Mechanics
Oden Institute for Computational Engineering and Sciences
University of Texas at Austin
Austin, TX
I will begin by probing into the past to discover the origins of the Finite Element Method (FEM), and then trace the evolution of those early developments to the present day in which the FEM is ubiquitous in science, engineering, mathematics, and medicine, and the most important discretization technology in Computational Mechanics.
However, despite its enormous success, there are still problems with contemporary technology, for example, building meshes from Computer Aided Design (CAD) representations is labor intensive, and a significant bottleneck in the design-through-analysis process; the introduction of geometry errors in computational models that arise due to feature removal, geometry clean-up and CAD “healing,” necessary to facilitate mesh generation; the inability of contemporary technology to “close the loop” with design optimization; and the failure of higher-order finite elements to achieve their full promise in industrial applications.
These issues are addressed by Isogeometric Analysis (IGA), the vision of which was first presented in a paper published October 1, 2005 [1]. Since then, IGA has become a focus of research within both FEM and CAD and is now a mainstream analysis methodology that has provided a new paradigm for computational model development [2-4]. The key concept utilized in the technical approach is the development of a new foundation for FEA, based on rich geometric descriptions originating in CAD, more tightly integrating design and analysis. Industrial applications and commercial software developments have expanded recently.
I will briefly present the motivation leading to IGA, its status, recent progress, areas of current activity, and what it offers for analysis model development and the design-through-analysis process. I will also argue that IGA provides an alternative and more robust approach to higher-order finite element analysis, filling the gap between low-order, geometrically versatile approaches and high-order, geometrically restrictive spectral methods. Finally, I will speculate on the future, the technologies that will prevail, computer developments, and the role of machine learning.
[1] T.J.R. Hughes, J.A. Cottrell and Y. Bazilevs, “Isogeometric Analysis: CAD, Finite Elements, NURBS, Exact Geometry and Mesh Refinement,” Computer Methods in Applied Mechanics and Engineering, 194, (2005) 4135-4195.
[2] J.A. Cottrell, T.J.R. Hughes and Y. Bazilevs, “Isogeometric Analysis: Toward Integration of CAD and FEA,” Wiley, Chichester, U.K., 2009.
[3] Special Issue on Isogeometric Analysis, (eds. T.J.R. Hughes, J.T. Oden and M. Papadrakakis), Computer Methods in Applied Mechanics and Engineering, 284, 1-1182, (1 February 2015).
[4] Special Issue on Isogeometric Analysis: Progress and Challenges, (eds. T.J.R. Hughes, J.T. Oden and M. Papadrakakis), Computer Methods in Applied Mechanics and Engineering, 316, 1-1270, (1 April 2017).
 Thomas J.R. Hughes holds B.E. and M.E. degrees in Mechanical Engineering from Pratt Institute and an M.S. in Mathematics and Ph.D. in Engineering Science from the University of California at Berkeley. He taught at Berkeley, Caltech, and Stanford before joining the University of Texas at Austin. At Stanford he served as Chairman of the Division of Applied Mechanics, Chairman of the Department of Mechanical Engineering, Chairman of the Division of Mechanics and Computation, and held the Crary Chair of Engineering.
Thomas J.R. Hughes holds B.E. and M.E. degrees in Mechanical Engineering from Pratt Institute and an M.S. in Mathematics and Ph.D. in Engineering Science from the University of California at Berkeley. He taught at Berkeley, Caltech, and Stanford before joining the University of Texas at Austin. At Stanford he served as Chairman of the Division of Applied Mechanics, Chairman of the Department of Mechanical Engineering, Chairman of the Division of Mechanics and Computation, and held the Crary Chair of Engineering.
Dr. Hughes is an elected member of the U.S. National Academy of Sciences, the U.S. National Academy of Engineering, the American Academy of Arts and Sciences, the Royal Society of London, the Austrian Academy of Sciences (Section for Mathematics and the Physical Sciences), the Istituto Lombardo Accademia di Scienze e Lettere (Mathematics Section), and the Academy of Medicine, Engineering and Science of Texas. Dr. Hughes is a Fellow of the AAAS, AIAA, ASCE, ASME, the U.S. Association for Computational Mechanics (USACM), the International Association for Computational Mechanics (IACM), the American Academy of Mechanics (AAM), the Society for Industrial and Applied Mathematics (SIAM), and the Engineering Mechanics Institute of ASCE. Dr. Hughes is a Founder and past President of USACM and IACM, past Chairman of the Applied Mechanics Division of ASME, past Chairman of the US National Committee on Theoretical and Applied Mechanics, and co-editor emeritus of the international journal, Computer Methods in Applied Mechanics and Engineering. He is an Honorary Member of the Japanese Association for Computational Mechanics (JACM).
Dr. Hughes is one of the most widely cited authors in Engineering Science. He has been elected to Distinguished Member, ASCE’s highest honor, and has received ASME’s highest honor, the ASME Medal. He has also been awarded the Walter L. Huber Civil Engineering Research Prize and von Karman Medal from ASCE, the Timoshenko, Worcester Reed Warner, and Melville Medals from ASME, the von Neumann Medal from USACM, the Gauss-Newton Medal from IACM, the Computational Mechanics Award from the Japan Society of Mechanical Engineers (JSME), the Grand Prize from the Japan Society of Computational Engineering and Science (JSCES), the Computational Mechanics Award from JACM, the Humboldt Research Award for Senior Scientists from the Alexander von Humboldt Foundation, the Wilhem Exner Medal from the Austrian Association für SME (Öesterreichischer Gewerbeverein, OGV), the International Scientific Career Award from the Argentinian Association for Computational Mechanics (AMCA), the SIAM/ACM (Association for Computing Machinery) Prize in Computational Science and Engineering, the Southeastern Universities Research Association (SURA) Distinguished Scientist Award, the O.C. Zienkiewicz Medal from the Polish Association for Computational Mechanics (PACM), the A.C. Eringen Medal from the Society for Engineering Science (SES), the Ralph E. Kleinman Prize from SIAM, the Monie A. Ferst Award of Sigma Xi, The Scientific Research Honor Society, and the William Benter Prize in Applied Mathematics from the Liu Bie Ju Centre for Mathematical Sciences, City University of Hong Kong.
Wednesday, August 28, 2024
Location: The Franklin Suite
(Tutor Campus Center, 3rd Floor)
Lunch reception will begin at 12 noon
Zoom wil begin at 12:30 pm
The Zoom webinar is at
https://usc.zoom.us/j/94634476349?pwd=5I3aFQUoV4sLjbxKf6PhwhBbyDFcjZ.1
host: Oberai
Modeling Drag and Heat Transfer on Riblets and Roughness
Daniel Chung
Associate Professor
Department of Mechanical Engineering
The University of Melbourne
Melbourne, Australia
Riblets are a surface texture that reduce skin-friction drag in turbulent flow, and can now be found on in-service aircraft. Riblet features are smaller than the smallest vortices of turbulence. On the fuselage of a passenger aircraft, riblet spacing is about 100 microns. Riblet performance is notoriously sensitive to the fine details of their micro-structure, with optimal performance thought to require sharp tips, which are impossible to manufacture and maintain in practice. Thus, their successful application requires careful lifetime management of performance benefits, balanced against manufacturing, installation and maintenance costs. Key to this balancing act is our ability to accurately predict riblet performance given the inevitable micro-structure imperfections. To this end, I will discuss our group’s flow-physical modeling of the interaction between detailed riblet shapes and the near-wall vortices of turbulence; the outcome is a consistent improvement in accuracy of performance predictions across diverse riblet shapes.
Predicting rough-wall heat transfer has been a longstanding challenge, especially when new surface topographies are encountered. The heat-transfer coefficient of accreted ice on aircraft is different from that of engineered heat-exchanger surface textures. The best we can do are empirical correlations, which are not reliable. It is widely known that rough-wall heat transfer is not analogous to skin friction, i.e. not Reynolds analogy, but, then, what is it? With access now to the detailed temperature and flow fields near roughness features, I will show that heat transfer peaks at regions of the surface that are exposed to the oncoming flow, and, at these regions, a local version of Reynolds analogy survives. These insights allow us to develop a simple physics-based model of heat transfer that accounts for topography and working-fluid variations.
 Daniel Chung is an associate professor in the Department of Mechanical Engineering at the University of Melbourne. He obtained his bachelor's degree in engineering and computer science from the University of Melbourne in 2003, and his PhD in aeronautics from Caltech in 2009. He was a postdoc at the Jet Propulsion Laboratory before joining the University of Melbourne in 2012. Daniel's research is in computational fluid mechanics, where he tries to distil turbulent flows into simplified problems and to build physics-based models for prediction. Recently, he has been interested in turbulent flow and thermal convection over rough surfaces, riblets and sea waves, including control. Daniel is currently on a sabbatical at USC until the end of November, hosted by Prof Mitul Luhar, and is keen to explore collaborations.
Daniel Chung is an associate professor in the Department of Mechanical Engineering at the University of Melbourne. He obtained his bachelor's degree in engineering and computer science from the University of Melbourne in 2003, and his PhD in aeronautics from Caltech in 2009. He was a postdoc at the Jet Propulsion Laboratory before joining the University of Melbourne in 2012. Daniel's research is in computational fluid mechanics, where he tries to distil turbulent flows into simplified problems and to build physics-based models for prediction. Recently, he has been interested in turbulent flow and thermal convection over rough surfaces, riblets and sea waves, including control. Daniel is currently on a sabbatical at USC until the end of November, hosted by Prof Mitul Luhar, and is keen to explore collaborations.
Wednesday, September 4, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Bermejo-Moreno, Luhar
Laser Induced Graphene: 2D-to-3D Transformation
Jian “Javen” Lin
Associate Professor of Mechanical and Aerospace Engineering and the William R. Kimel Faculty Fellow in Engineering
Mechanical and Aerospace Engineering Department
University of Missouri
Columbia, MO
Since disclosed in 2014, laser induced graphene (LIG) has been explored for applications in various fields, ranging from materials science, environment to sensor and electronics. Despite much progress, due to limitation of the technology advances, the reports are quite restricted to planar (2D) device fabrication capability. To tackle this challenge, in this talk, we will discuss new strides in advancing the capability from 2D to 3D to unlock LIG potential in multifunctional 3D devices. The first technological advance is to develop a 5-axis laser processing platform in 2023. With the two additional two degrees of freedom, the laser beam can be focused on any arbitrary surfaces so that freeform laser induction (FLI) of representative LIG, metals, and metal oxides as high-performance sensing and electrode materials for 3D conformable electronics was realized. Based on this success, in 2024, we made a new progress in developing a freeform multimaterial assembly platform (FMAP) by integrating 3D printing (fused filament fabrication (FFM), direct ink writing (DIW)) with the FLI technique. 3D printing performs the 3D polymer material assembly, while the FLI in-situ synthesizes functional materials (LIG, metals, and semiconductors) on or within any predesigned locations of the 3D structures by synergistical, programmed control system actuation. By this robotic fabrication platform, a crossbar LED circuit, touchpad for human-machine interactions, multiple sensors, sensor-enveloped springs, 3D micro electromagnets, force feedback manipulators, and microfluidic reactors with embedded heating elements were demonstrated to show versatility and effectiveness of the methodology. Finally, we will discuss how artificial intelligence, generative models can be applied to such a robotic system to push it toward a fully autonomous fabrication system.
References: Nat. Commun., 5, 5714, 2014; Adv. Funct. Mater. 33 (1), 2210084, 2023; Nat. Commun., 15 (1), 4541, 2024.
 Jian “Javen” Lin is an Associate Professor of Mechanical and Aerospace Engineering and the William R. Kimel Faculty Fellow in Engineering at University of Missouri (MU), where he was an Assistant Professor from 2014 to 2020. Prior to MU, he was a postdoctoral research associate in the Department of Mechanical Engineering & Materials Science at Rice University under guidance of Dr. James M. Tour from 2011 to 2014. He got his B.S. in Mechanical and Automation Engineering from Zhejiang University in 2007. He then studied at University of California-Riverside and received his M.S. in Electrical Engineering and Ph.D. in Mechanical Engineering in 2010 and 2011, respectively. Dr. Lin was awarded the ORAU Ralph E. Powe Junior Faculty Enhancement Award In 2015, received an Emerging Young Investigator award from Journal of Material Chemistry in 2016 and Sony Faculty Innovation Award in 2020. Since 2019, he has been continuously listed in Top 2% Scientists in the World by Stanford Advanced Study Institute. Dr. Lin’s research group dedicates research in materials and advanced manufacturing to promote biomedical, energy, and robotics fields. His research lies in two main clusters: 1) autonomous manufacturing powered by artificial intelligence and robotics; 2) 3D/4D printing. He has published ~ 120 journal papers and 6 issued patents with Google Scholar citations of > 13,000.
Jian “Javen” Lin is an Associate Professor of Mechanical and Aerospace Engineering and the William R. Kimel Faculty Fellow in Engineering at University of Missouri (MU), where he was an Assistant Professor from 2014 to 2020. Prior to MU, he was a postdoctoral research associate in the Department of Mechanical Engineering & Materials Science at Rice University under guidance of Dr. James M. Tour from 2011 to 2014. He got his B.S. in Mechanical and Automation Engineering from Zhejiang University in 2007. He then studied at University of California-Riverside and received his M.S. in Electrical Engineering and Ph.D. in Mechanical Engineering in 2010 and 2011, respectively. Dr. Lin was awarded the ORAU Ralph E. Powe Junior Faculty Enhancement Award In 2015, received an Emerging Young Investigator award from Journal of Material Chemistry in 2016 and Sony Faculty Innovation Award in 2020. Since 2019, he has been continuously listed in Top 2% Scientists in the World by Stanford Advanced Study Institute. Dr. Lin’s research group dedicates research in materials and advanced manufacturing to promote biomedical, energy, and robotics fields. His research lies in two main clusters: 1) autonomous manufacturing powered by artificial intelligence and robotics; 2) 3D/4D printing. He has published ~ 120 journal papers and 6 issued patents with Google Scholar citations of > 13,000.
Wednesday, September 11, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Chen
Solution of Physics-Constrained Inverse Problems Using Conditional Diffusion Models
Agnimitra Dasgupta
Postdoctoral Researcher
Department of Aerospace and Mechanical Engineering
University of Southern California
Los Angeles, CA
Inverse problems involve deducing the cause from observed effects and are ubiquitous across several science and engineering disciplines. Generally ill-posed, an inverse problem often has multiple solutions. The Bayesian paradigm remains popular for the statistical treatment of inverse problems because it is useful for characterizing the relative plausibility of different solutions. However, Bayesian inference is computationally intractable in most practical scenarios. Some recurring challenges include summarizing available data into informative priors, sampling high-dimensional posteriors, and the need for multiple evaluations of a compute-intensive numerical model, likely black-box and mis-specified, for the forward physics. This talk will introduce conditional score-based diffusion models for solving inverse elasticity problems. A conditional score-based diffusion model uses a neural network to approximate the target posterior distribution’s ‘score function’, defined as the gradient of the logarithm of the density. Subsequently, Langevin dynamics enables the generation of new realizations from the target posterior. Training the diffusion model requires a supervised dataset, and forward model simulations can easily construct it. Therefore, the proposed approach is simulation-based and likelihood-free, and there is no need for gradient computations through the forward physics model. Moreover, the diffusion model is reusable for different measurement instances, unlike conventional MCMC-based inference, which amortizes the cost of inference. This talk will demonstrate the efficacy of conditional score-based diffusion model-driven inference on several physics-constrained inverse problems, primarily concerning inverse elasticity problems, that involve synthetic and real experimental data.
Agnimitra Dasgupta is a Postdoctoral Research Associate in the Aerospace and Mechanical Engineering Department at the University of Southern California (USC). He obtained his Ph.D. in Civil Engineering from USC and a Master's in Civil Engineering from the Indian Institute of Science. Agnimitra's research interest lies at the intersection of uncertainty quantification and scientific machine learning with applications ranging from the health to infrastructure sectors. Agnimitra received the Provost’s Fellowship from USC between 2017 and 2021.
Wednesday, September 18, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Oberai
Modal Decomposition for the Discovery of Nonlinear Flow Physics
Oliver Schmidt
Associate Professor
Department of Mechanical and Aerospace Engineering
University of California at San Diego
La Jolla, CA
Modal decomposition techniques are at the forefront of uncovering nonlinear flow physics from large experimental and numerical datasets, particularly in complex engineering and natural flows. Among the most prominent of these techniques are Proper Orthogonal Decomposition (POD) and Dynamic Mode Decomposition (DMD), which extract the energetically and dynamically most relevant flow features, respectively. While both methods yield accurate low-dimensional representations of flow dynamics, neither provides direct, quantitative insight into the nonlinear interactions that govern these dynamics. The common approach remains to rely on power or cross-spectral peaks as heuristic indicators of nonlinear interactions.
In this talk, I will present a novel orthogonal triadic decomposition technique that systematically identifies and quantifies nonlinear flow phenomena. By extracting flow structures linked to triadic nonlinear interactions—the core mechanism of energy transfer in turbulence—this method offers a powerful new tool for physical discovery. I will demonstrate its application in two examples: cylinder flow, a canonical flow example, and large-eddy simulation data of a plasma-actuated twin rectangular jet, a complex engineering flow. These cases illustrate how this decomposition technique not only improves our understanding of nonlinear interactions but also lays the groundwork for future reduced-order models of complex flows.
 Oliver Schmidt is an Associate Professor in the Department of Mechanical and Aerospace Engineering at UC San Diego's Jacobs School of Engineering and a recipient of the NSF CAREER award. Prior to joining UC San Diego, he was a Postdoctoral Scholar in Mechanical and Civil Engineering at the California Institute of Technology. He earned his Ph.D. in Aeronautical Engineering from the University of Stuttgart in 2014. His research centers on physics-based modeling and computational fluid dynamics, with applications spanning aerospace sciences, high-energy laser systems, and physical oceanography. His work is supported by the AFOSR, ONR, DOE, and NSF.
Oliver Schmidt is an Associate Professor in the Department of Mechanical and Aerospace Engineering at UC San Diego's Jacobs School of Engineering and a recipient of the NSF CAREER award. Prior to joining UC San Diego, he was a Postdoctoral Scholar in Mechanical and Civil Engineering at the California Institute of Technology. He earned his Ph.D. in Aeronautical Engineering from the University of Stuttgart in 2014. His research centers on physics-based modeling and computational fluid dynamics, with applications spanning aerospace sciences, high-energy laser systems, and physical oceanography. His work is supported by the AFOSR, ONR, DOE, and NSF.
Wednesday, September 25, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Bermejo-Moreno
Lighting the Fuse to Enable Metamaterials for Passive, Adaptive Flow Control
Andres Goza
Assistant Professor
Department of Aerospace Engineering
University of Illinois at Urbana-Champagne
Urbana, IL
Unsteady flow control is challenging in many engineering domains. Active techniques are costly, energy-intensive, and heavy, while passive approaches often lack robustness in handling complex flow dynamics. Metamaterials are structures with engineered architecture, allowing for catered response behaviors to stimuli. These structures offer a transformative potential for flow control by flow-metamaterial interaction, FMI. FMI could allow engineers to leverage architected structures to passively and adaptively produce desired flow responses.
To capitalize on this potential, however, we must first identify which classes of metamaterials are most promising for different flow scenarios, and understand how to align the key metamaterial behaviors with the relevant flow length- and timescales to enable favorable flow-structure interplay. This understanding must account for the behavior of the fully coupled flow-metamaterial system, which will generally yield dynamics with distinct time/length scales from those of the constituent flow/structure systems. Obtaining this understanding requires a suite of computational tools capable of predicting and understanding the flow-structure interplay between the targeted complex flows and modern architected structures.
We present some a-la-carte results on these various challenges and opportunities. We discuss some key metamaterial classes promising for certain flow behaviors. We share some ongoing development of high-fidelity and resolvent computational tools within an immersed boundary framework, currently without flow-structure interplay but being designed to enable robust, versatile computations between flows and a wide range of metamaterials. Finally, for simplified flow-metamaterial configurations, we discuss efforts to synthesize appropriate dimensionless parameters, expressed in terms of key intrinsic properties of the separate flow/structure systems, that govern the FMI system's behavior.
*Andres is grateful for funding from AFOSR to perform the presented work.
Andres is an Assistant Professor at UIUC. He uses computational techniques to study flow-structure interaction, particularly when the structure has some heterogeneous properties that make the coupled behavior more complex. He is interested in developing high-fidelity and analysis techniques to simulate and understand these dynamics. He also has two young children that bring fun regular surprises, and enjoys running, cycling, squash, and bouldering.
Wednesday, October 2, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Luhar
Printed 3D Microelectronics: Process Development, Materials Science, and Devices Applications
Rahul Panat
Professor
Mechanical Engineering Department
Carnegie Mellon University
Pittsburgh, PA
In this research, we develop a printed microelectronics technique based on droplet-based nanoparticle printing using the Aerosol Jet (AJ) technology. A balance between inertia forces and surface forces for the microdroplets (each containing nanoparticles), along with rapid solvent evaporation are used to create highly complex 3D microarchitectures of metals and polymers without auxiliary support and with near-fully dense truss members. Highly intricate 3-D micro-lattices, pillars, interconnects, and spirals are demonstrated.
We then use these structures to: (i) study fundamental material science, and (ii) demonstrate device applications with extraordinary performance that cannot be achieved by any other method. For (i), a temperature-gradient-driven mass transport is shown as a new mechanism of 4D printing. For (ii), novel 3D geometry of electrodes enables detection of pathogen antibodies and antigens in 10-12 seconds at femtomolar sensitivities - the fastest detection of disease biomarkers yet reported! This technology is validated through human trials. In addition, the 3D microarchitectures in our lab enable fully customizable brain-computer interfaces (BCIs) that record electrical signals between neurons at densities of thousands of electrodes/cm2, which is 5-10× the current state-of-the-art BCI technologies. The technology was validated through animal testing via recording of the action potentials from the mouse brain. We also demonstrated the printing of high-capacity Li-ion batteries and thin flexible robotic skins with embedded sensors. Lastly, our ongoing work on creating manufacturing digital twins of the AJ printing process is also discussed.
 Rahul Panat is Professor of Mechanical Engineering at Carnegie Mellon University (CMU). He is courtesy faculty in the Materials Science and Engineering and the Robotics Institute at CMU. He is also the Associate Director of Research at the Manufacturing Futures Institute at CMU, which is focused on bringing the latest advances in digital technologies to advanced manufacturing.
Rahul Panat is Professor of Mechanical Engineering at Carnegie Mellon University (CMU). He is courtesy faculty in the Materials Science and Engineering and the Robotics Institute at CMU. He is also the Associate Director of Research at the Manufacturing Futures Institute at CMU, which is focused on bringing the latest advances in digital technologies to advanced manufacturing.
Prof. Panat completed his PhD in Theoretical and Applied Mechanics from the University of Illinois at Urbana in 2004. He joined Intel Corporation’s R&D unit in Chandler, AZ, where he worked for 10 years on microprocessor materials and manufacturing R&D - specifically on 3D heterogeneous integration. At Intel, Dr. Panat led a team of engineers that developed the fabrication process for world’s first halogen-free IC chip. He was part of a team that introduced the first Si chip with a billion transistors. He returned to academia in 2014 and joined CMU in fall 2017. His research is focused on microscale 3D printing and its applications to biomedical engineering, stretchable electronics, and Li-ion batteries. He has obtained > $7.5 million in research funding from US Intelligence agencies, US Air Force, US Army, ARPA-H, National Institutes of Health (NIH), Department of Energy (DOE), National Science Foundation (NSF), and industry. Prof. Panat is recipient of several awards, including MRS gold medal, Mavis Memorial Award, an award at Intel for his work on the halogen-free chip, Struminger Teaching Fellowship, and the Russell V. Trader chair professorship at CMU.
Wednesday, October 9, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Zhao
Phase Transformations in Multifunctional Materials
Ananya Renuka Balakrishna
Assistant Professor
Mechanical Engineering Department
University of California at Santa Barbara
Santa Barbara, CA
Phase transformation materials are characterized by their ability to rapidly and reversibly switch between distinct properties, such as insulating and conducting, paramagnetic and ferromagnetic, or Li-rich and Li-poor. These transformations, however, are accompanied by abrupt structural changes in the crystal lattices, which can nucleate defects, accumulate strain energy, and accelerate material decay. We investigate these transformations in multifunctional materials from the viewpoint of Ericksen’s multiple energy wells. By doing so, we identify important links between material constants, crystallographic microstructures, and macroscopic properties. This approach to understanding material behavior from the perspective of energy landscapes may suggest new ways to design materials with improved properties and lifespans. In this talk, I will present our findings on phase transformations in battery electrodes (intercalation compounds), photomechanical materials (molecular crystals), and soft magnetic alloys. Most of this work has primarily been conducted by Delin Zhang (PhD candidate at USC/AME) and Devesh Tiwari (MS from USC/AME).
 Ananya Renuka Balakrishna is an Assistant Professor in the Materials Department at the University of California Santa Barbara. She received her B.Tech degree in Mechanical Engineering from the National Institute of Technology Karnataka and her Ph.D. in Solid Mechanics and Materials Engineering from the University of Oxford. Before her current appointment, she was a Lindemann Postdoctoral Fellow at MIT and the University of Minnesota and joined the faculty in the Department of Aerospace & Mechanical Engineering at the University of Southern California in 2020. Her research group develops theoretical models to understand the interplay between fundamental material constants and microstructural instabilities, and how they collectively shape the physical response of a material.
Ananya Renuka Balakrishna is an Assistant Professor in the Materials Department at the University of California Santa Barbara. She received her B.Tech degree in Mechanical Engineering from the National Institute of Technology Karnataka and her Ph.D. in Solid Mechanics and Materials Engineering from the University of Oxford. Before her current appointment, she was a Lindemann Postdoctoral Fellow at MIT and the University of Minnesota and joined the faculty in the Department of Aerospace & Mechanical Engineering at the University of Southern California in 2020. Her research group develops theoretical models to understand the interplay between fundamental material constants and microstructural instabilities, and how they collectively shape the physical response of a material.
Wednesday, October 16, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Zhao
Physics-Based AI-Assisted Design and Control of Manufacturing Processes
Jian Cao
Cardiss Collins Professor, Department of Mechanical Engineering
(by courtesy) Department of Materials Science and Engineering
(by courtesy) Department of Civil and Environmental Engineering
Director, Northwestern Initiative on Manufacturing Science and Innovation
Associate Vice President for Research
Norhwestern University
Evanston, IL
Current research efforts at my manufacturing group aim to advance the capability to co-design materials and manufacturing processes using hybrid physics-based and data-driven approaches. In this talk, I will demonstrate our work in the development of differentiable simulation tools, sensing, and process control to achieve effective and efficient predictions and control of a material’s mechanical behavior in metal additive manufacturing processes. Furthermore, I will show how we use machine learning to accelerate the physics-based simulations and to realize active sensing with the goal of effective in-situ local process control. Our solutions particularly target three notoriously challenging aspects of the process: long history-dependent properties, complex geometric features, and the high dimensionality of their design space. The approaches are applicable to other manufacturing processes as well, such as flexible incremental forming.
 Cardiss Collins Professor Jian Cao (MIT’Ph.D, MIT’MS, SJTU’BS) specialized in innovative manufacturing processes and systems, particularly in the areas of deformation-based processes and laser additive manufacturing processes. She is the Founding Director of the research center on Manufacturing Science and Innovation at Northwestern, known as NIMSI.
Cardiss Collins Professor Jian Cao (MIT’Ph.D, MIT’MS, SJTU’BS) specialized in innovative manufacturing processes and systems, particularly in the areas of deformation-based processes and laser additive manufacturing processes. She is the Founding Director of the research center on Manufacturing Science and Innovation at Northwestern, known as NIMSI.
Prof. Cao is an elected member of the National Academy of Engineering (NAE) and of the American Academy of Arts and Sciences (AAA&S). She is a Fellow of American Association for the Advancement of Science (AAAS), ASME, the International Academy for Production Engineering (CIRP) and SME. Her major awards include DoD Vannevar Bush Faculty Fellowship, ASME Ted Belytschko Applied Mechanics Award, the inaugural ASME Devor-Kapoor Manufacturing Medal, Hideo Hanafusa Outstanding Investigator Award for Flexible Automation, ASME Milton C. Shaw Manufacturing Research Medal, Charles Russ Richards Memorial Award from ASME and Pi Tau Sigma, SME Gold Medal, and SME Frederick W. Taylor Research Medal. Cao was the Editor-in-Chief of Journal of Materials Processing Technology.
Prof. Cao now serves as an Associate Vice President for Research at Northwestern, a member of the National Materials and Manufacturing Board of the National Academies, a member of the Defense Materials, Manufacturing and its Infrastructure (DMMI) Standing Committee of the National Academies, Board of Directors of SME, and Board of mHUB – accelerator for hardtech innovation and manufacturing in Chicago.
Wednesday, October 23, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Gupta, Zhao
Composable Optimization for Robotic Motion Planning and Control
Zac Manchester
Assistant Professor
The Robotics Institute
Carnegie Mellon University
Pittsburg, PA
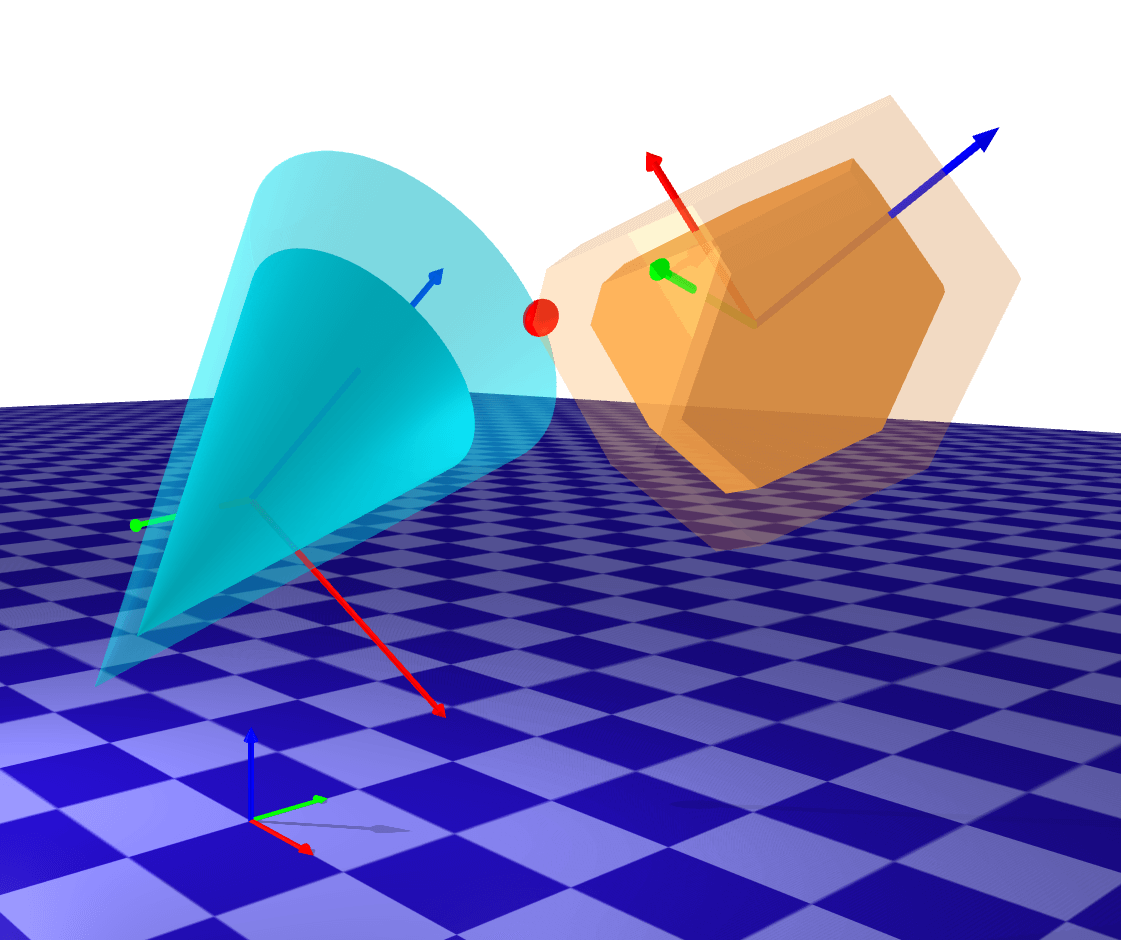 Contact interactions are pervasive in key real-world robotic tasks like manipulation and walking. However, the non-smooth dynamics associated with impacts and friction remain challenging to model, and motion planning and control algorithms that can fluently and efficiently reason about contact remain elusive. In this talk, I will share recent work from my research group that takes an “optimization-first” approach to these challenges: collision detection, physics, motion planning, state estimation, and control are all posed as constrained optimization problems. We then build a set of algorithmic and numerical tools that allow us to flexibly compose these optimization sub-problems to solve complex robotics problems involving discontinuous, unplanned, and uncertain contact mechanics.
Contact interactions are pervasive in key real-world robotic tasks like manipulation and walking. However, the non-smooth dynamics associated with impacts and friction remain challenging to model, and motion planning and control algorithms that can fluently and efficiently reason about contact remain elusive. In this talk, I will share recent work from my research group that takes an “optimization-first” approach to these challenges: collision detection, physics, motion planning, state estimation, and control are all posed as constrained optimization problems. We then build a set of algorithmic and numerical tools that allow us to flexibly compose these optimization sub-problems to solve complex robotics problems involving discontinuous, unplanned, and uncertain contact mechanics.
 Zac Manchester is an Assistant Professor of Robotics at Carnegie Mellon University. He holds a Ph.D. in aerospace engineering and a B.S. in applied physics from Cornell University. Zac was a postdoc in the Agile Robotics Lab at Harvard University and previously worked at Stanford, NASA Ames Research Center and Analytical Graphics, Inc. He received a NASA Early Career Faculty Award in 2018 and has led four satellite missions. His research interests include motion planning, control, and numerical optimization, particularly with application to robotic locomotion and spacecraft guidance, navigation, and control.
Zac Manchester is an Assistant Professor of Robotics at Carnegie Mellon University. He holds a Ph.D. in aerospace engineering and a B.S. in applied physics from Cornell University. Zac was a postdoc in the Agile Robotics Lab at Harvard University and previously worked at Stanford, NASA Ames Research Center and Analytical Graphics, Inc. He received a NASA Early Career Faculty Award in 2018 and has led four satellite missions. His research interests include motion planning, control, and numerical optimization, particularly with application to robotic locomotion and spacecraft guidance, navigation, and control.
Wednesday, November 6, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Nguyen
Mechanism-Based Mechanical Metamaterials
Robert V. Kohn
Professor Emeritus
Courant Institute of Mathematical Sciences
New York University
New York, NY
The design and analysis of mechanism-based mechanical metamaterials is a relatively new and rapidly growing research area. It studies artificial "materials" that take advantage of "mechanisms" (that is, nontrivial energy-free deformations) to achieve interesting macroscopic behavior. The relevant mechanics is nonlinear, since mechanisms involve large rotations. While there have been insightful studies of specific examples, some fundamental issues remain poorly understood. This talk will address two of them, namely (a) how to analyze a metamaterial's macroscopic behavior, and (b) whether linear elastic calculations can still be of use in the analysis of such systems, despite the fact that their mechanisms involve large rotations? My talk will start with a broad introduction to this area; then I'll discuss some recent work with Xuenan Li, which focuses on a particular (very rich) example — the Kagome metamaterial. This system is interesting because it has infinitely many mechanisms, yet it behaves macroscopically as a nonlinear elastic material whose stress-free states are compressive conformal maps.
 Robert V. Kohn is Professor Emeritus of Mathematics at New York
University's Courant Institute of Mathematical Sciences. He received his
PhD in Mathematics from Princeton in 1979, then held a two-year NSF
Postdoctoral Fellowship which took him to the Courant Institute. He
joined the faculty of the Courant Institute 1981, becoming Full
Professor in 1988 and Silver Professor in 2017 before choosing to retire
in 2022. Much of his work has addressed problems from mechanics and
physics using methods from the calculus of variations and partial
differential equations. He has, in particular, studied many examples of
energy-driven pattern formation, in diverse systems ranging from
shape-memory materials to thin elastic sheets. Professor Kohn's
recognitions include selection as a member of the American Academy of
Arts and Sciences, receipt of the American Mathematical Society's 2014
Leroy P. Steele Award, and being selected as both a SIAM Fellow and a
Fellow of the American Mathematical Society.
Robert V. Kohn is Professor Emeritus of Mathematics at New York
University's Courant Institute of Mathematical Sciences. He received his
PhD in Mathematics from Princeton in 1979, then held a two-year NSF
Postdoctoral Fellowship which took him to the Courant Institute. He
joined the faculty of the Courant Institute 1981, becoming Full
Professor in 1988 and Silver Professor in 2017 before choosing to retire
in 2022. Much of his work has addressed problems from mechanics and
physics using methods from the calculus of variations and partial
differential equations. He has, in particular, studied many examples of
energy-driven pattern formation, in diverse systems ranging from
shape-memory materials to thin elastic sheets. Professor Kohn's
recognitions include selection as a member of the American Academy of
Arts and Sciences, receipt of the American Mathematical Society's 2014
Leroy P. Steele Award, and being selected as both a SIAM Fellow and a
Fellow of the American Mathematical Society.
Wednesday, November 13, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Newton, Plucinsky
The Art and the Science of Metal 3D Printing
Adrian J. Lew
Professor
Department of Mechanical Engineering
and
Institute for Computational and Mathematical Engineering
Stanford University
Stanford, CA
This is the title of a class I teach at Stanford on metal 3D printing, and it reflects my perspective on where metal 3D printing is today: part art and part science, because of the complexities and multiple physical processes at play. Printing strategies are inspired in science, but when it comes time to print a new alloy or a complex geometry, the art storms in to help bridge the gaps in understanding. A goal in metal 3D printing research is to shift this balance towards science.
In this talk I will first describe the main physical processes involved one of the most widely adopted metal 3D printing technologies, Laser Powder Bed Fusion (LPBF), and then showcase three vignettes of contributions we made: (a) in-situ alloying and printing of tantalum-tungsten alloys, (b) the “surprising” behavior of some martensitic steels under 3D printing conditions, (c) two ways to alter the optical absorptivity of highly-reflective metallic powders to facilitate printing of copper in some standard printers. The art and the science are interweaved in the three contributions.
 Adrian J. Lew is a Professor of Mechanical Engineering and the Institute for Computational and Mathematical Engineering at Stanford University. He graduated with the degree of Nuclear Engineer from the Instituto Balseiro in Argentina, and received his master of science and doctoral degrees in Aeronautics from the California Institute of Technology. He is a fellow of the International Association for Computational Mechanics, and has been awarded Young Investigator Award by the International Association for Computational Mechanics, the ONR Young Investigator Award, the NSF Career Award, and the Ferdinand P. Beer & Russel Johnston, Jr., Outstanding New Mechanics Educator Award from the American Society of Engineering Education. He has also received an honorable mention by the Federal Communication Commission for the creation of the Virtual Braille Keyboard. He was the first USACM Technical Thrust Area Lead for Manufacturing, and still serves it as a member. He is currently member of the Technical Advisory Board for Velo 3D, a metal 3D printing start-up located in Campbell, CA, and consultant to other metal 3D printing companies.
Adrian J. Lew is a Professor of Mechanical Engineering and the Institute for Computational and Mathematical Engineering at Stanford University. He graduated with the degree of Nuclear Engineer from the Instituto Balseiro in Argentina, and received his master of science and doctoral degrees in Aeronautics from the California Institute of Technology. He is a fellow of the International Association for Computational Mechanics, and has been awarded Young Investigator Award by the International Association for Computational Mechanics, the ONR Young Investigator Award, the NSF Career Award, and the Ferdinand P. Beer & Russel Johnston, Jr., Outstanding New Mechanics Educator Award from the American Society of Engineering Education. He has also received an honorable mention by the Federal Communication Commission for the creation of the Virtual Braille Keyboard. He was the first USACM Technical Thrust Area Lead for Manufacturing, and still serves it as a member. He is currently member of the Technical Advisory Board for Velo 3D, a metal 3D printing start-up located in Campbell, CA, and consultant to other metal 3D printing companies.
Wednesday, November 20, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
hosts: Plucinsky, Pantano-Rubino
Shaping up to Explore and Exploit Unsteady Fluid-structure Interactions
Karen Mulleners
Associate Professor
Institute of Mechanical Engineering
École Polytechnique Fédérale de Lausanne (EPFL)
Lausanne, Switzerland
Nature is full of thin, flexible objects that bend, flutter, or flap in the wind or the water such as leaves of trees and bushes, insect wings, and fish fins. A remarkable feature that is common to these objects is their ability to deform when interacting with the air or the water in a way that benefits them. Leaves of trees bend in the wind to reduce their resistance and the loads on their stems. The flexibility of insect wings and fish fins can reduce the effort the animals need to stay aloft or to propel themselves and increases their performance and agility. Leaves, insect wings, and fish fins come in a myriad of different shapes and sizes. Surprisingly, the influence of the shape of thin flexible objects on their fluid structure interactions has not yet received much attention. In our lab, we design unsteady fluid-structure interaction experiments to close that gap and fundamentally study how the shape of flexible structures and their ability to reconfigure changes their fluid dynamic performance and resilience in dynamic fluid environments. I will present recent work including experimental investigations of the fluid-structure interactions of deformable flapping wings, reconfiguring disks, and flapping flags.
Karen Mulleners is an associate professor in the institute of mechanical engineering in the school of engineering at EPFL. She is the head of the unsteady flow diagnostics laboratory (UNFoLD). She is an experimental fluid dynamicist who focuses on unfolding the origin and development of unsteady flow separation and vortex formation. Karen studied physics in Belgium (Hasselt University, previously Limburgs Universitair Centrum) and the Netherlands (TU Eindhoven). She received her PhD in mechanical engineering from the Leibniz Universität Hannover in Germany in 2010 for her work on dynamic stall on pitching airfoils that she conducted as a member of the German aerospace centre (DLR) in Göttingen. Before joining EPFL in 2016, Karen was a (non-tenure track) assistant professor at the Leibniz Universität Hannover in Germany.
Thursday, Novermber 21, 2024
10:00 AM
Laufer Conference Room (OHE 406)
host: Spedding
Lifting Surfaces at Aerodynamically low Reynolds numbers: Recent Advances
Serhiy Yarusevych
Professor
Department of Mechanical and Mechatronics Engineering
University of Waterloo
Waterloo, ON, Canada
Flow development over lifting surfaces in aerodynamically low Reynolds number flows (Re<500,000) is largely governed by boundary layer separation and subsequent separated sear layer development on the suction side. In the time-averaged sense, rapid laminar-to-turbulent transition in the separated shear layer leads to the formation of a closed recirculating flow region referred to as the Laminar Separation Bubble (LSB). However, LSBs feature rich dynamics associated with the formation and evolution of shear layer roll up vortices leading to laminar-to-turbulent transition. Linear stability analysis confirms that there is a continuous stability spectrum spanning laminar boundary later and separated shear layer regions, linking LSB transition and shear layer vortex shedding to upstream amplification of disturbances that originate from free-stream perturbations in the receptivity region. Flow development in the aft portion of the bubble is highly three-dimensional even on nominally two-dimensional geometries. It manifests in progressive deformation of shear layer vortices and subsequent vortex breakdown. On a finite wing, an open LSB forms due to wing tip and root effects. Away from the affected regions, however, LSB topology and dynamics appear to be quasi two-dimensional despite effective angle of attack variation across the span. Changes in operating conditions, including velocity and angle of attack, can lead to significant transient flow developments associated with bubble bursting (i.e., sudden lengthening or full separation without subsequent reattachment) and LSB re-formation, accompanied by substantial changes in aerodynamic loads.
Serhiy Yarusevych is a full professor in the Department of Mechanical and Mechatronics Engineering at the University of Waterloo, Canada. He is directing the Fluid Mechanics Research Laboratory focused on multidisciplinary applications of fluid mechanics in engineering and science, including operation of lifting surfaces at low Reynolds numbers, flows over bluff bodies, free shear flows, flow induced vibrations and noise, and flow control. The associated research involves a combination of experimental, analytical, and numerical tools, with the main emphasis placed on experiments involving particle image velocimetry. His research in Canada was interposed by sabbatical leaves at TU Delft and the University of Bundeswehr Munich, in 2013-2014 and 2019-2020, respectively, involving collaborative research with advanced flow diagnostic tools and volumetric measurements. Dr. Yarusevych is an Alexander von Humboldt Fellow, Mercator Fellow, and Associate Fellow of AIAA. Since 2018, Dr. Yarusevych has been serving as an Editor-in-Chief of Experimental Thermal and Fluid Science, Elsevier.
Friday, November 22, 2024
10:00 AM
Laufer Conference Room (OHE 406)
host: Spedding
Rigidity and Resilience of Network-like Soft Materials: Insights from Biopolymer Networks and Circadian Colloids
Moumita Das
Professor
School of Physics and Astronomy
Rochester Institute of Technology
Rochester, NY
Living systems exhibit unique emergent properties such as self-assembly, rigidity, resilience, and robustness. In this talk, I will present results from projects that underscore the importance of understanding these collective properties in network-like soft materials and help to address key questions in the rational design of biomimetic soft materials: Can we engineer composite soft matter to display life-like emergent properties? How can we enhance the tunability and control of such soft matter systems? And, is it feasible to activate synthetic soft materials using biological processes? I will begin by examining potential physical mechanisms that underlie robust and resilient mechanical properties in biopolymer networks in cells and tissues. Utilizing rigidity percolation theory, we explore how composite and heterogeneous composition influence cell and tissue mechanics and suggest design principles for artificial constructs with tunable and robust mechanics. Following this, I will discuss the formation and manipulation of colloidal networks using functionalized clock proteins—proteins that regulate biological clocks—to engineer robust self-assembly kinetics and material properties in colloidal systems. Leveraging such protein-based reaction networks allows us to endow synthetic systems with life-like properties. Our findings demonstrate how understanding the emergent structure-function properties in biological and bio-hybrid systems can support the development of biomimetic materials that not only mirror the robustness and adaptability of living systems but also offer enhanced control over their physical properties and functions.

Wednesday, December 4, 2024
3:30 PM
Science & Engineering Library, Room 202 (SSL 202)
The Zoom webinar is at https://usc.zoom.us/j/96060458816?pwd=8LmoG2q6vBCQubqqWpcizd2F1bxqsH.1
host: Kanso